以上,介绍了动态障碍物滤除算法应用层面和基本原理,这一章节中将具体推荐几个本人认为很有参考价值、值得学习并值得花时间去复现的几个动态障碍物滤除算法和理论。
以下论文pdf和代码链接,在公众号「计算机视觉工坊」后台,回复「原论文」即可获取。4.1、基于点云分割的滤除算法(segmentation-based method)推荐
【1】Zhou, H. et al. (2020) Cylinder3D: An effective 3D framework for driving-scene lidar semantic segmentation, arXiv.org. Available at: https://arxiv.org/abs/2008.01550 (Accessed: 22 August 2023).
在线实时的过滤算法,长期霸榜SemanticKITTI:Moving Object Segmanteion,
【2】Pfreundschuh, Patrick, et al. "Dynamic Object Aware LiDAR SLAM based on Automatic Generation of Training Data."2021 IEEE International Conference on Robotics and Automation (ICRA), 2021.
在线实时的过滤算法,苏黎世理工出品,必属精品
【3】PRBonn (no date) PRBonn/LIDAR-MOS: (LMNet) moving object segmentation in 3D LIDAR DATA: A learning-based approach exploiting sequential data (RAL/IROS 2021), GitHub. Available at: https://github.com/PRBonn/LiDAR-MOS (Accessed: 22 August 2023).
在线实时的过滤算法,新晋动态障碍物滤除算法,近期热度很高
4.2、基于可见性的滤除算法(visibility-based method)推荐【4】G. Kim and A. Kim, “Remove, then revert: Static point cloud map construction using multiresolution range images,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
离线后处理的过滤算法,应该是2020年热度最高的动态障碍物滤除算法了,理论好理解,代码移植容易,且还可以深度开发用于life-long slam。详细论文的解析可见:https://zhuanlan.zhihu.com/p/491271775
【5】F. Pomerleau, P. Krusi, F. Colas, P. Furgale, and R. Siegwart, “Long-term 3d map maintenance in dynamic environments,” in 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014.
离线后处理的过滤算法,与REMOVERT一致的地方在于也是可以深度开发用于life-long slam。这里也推荐「3D视觉工坊」新课程《面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)》。
4.3、基于栅格的滤除算法(voxel-based method)推荐【6】J. Schauer and A. Nuchter, “The peopleremover—removing dynamic objects from 3-d point cloud data by traversing a voxel occupancy grid,” IEEE robotics and automation letters (RAL), 2018.
离线后处理的过滤算法,经典中的经典,考虑的细节很多,开源代码的工程实现也很值得学习。
【7】cartographer中2D、3D概率占栅格地图中的更新和维护方式,传统且稳定,简单且优质,强推,值得学习。可以在线处理也可以离线后处理的过滤算法。
5、小结不论实时地、在线的动态障碍物过滤还是离线的动态障碍物过滤,背后的研究因素是因为权衡了实时性和算法质量,两者之间存在一个trade off,每一位研究学者期待的都是高效且准确地的动态障碍物滤除算法。
一方面,基于可见性的动态障碍物滤除算法,可以发现相关论文里使用的数据集和处理方式必须保证稀疏性,否则在实际操作中对大地图(百万级别的点云地图)处理的计算消耗很大,运行效率很低。其主要原因是在于基于可见性的算法,需要在每一次遍历过程中将query point map和global point map进行视角的坐标转换,当global point map的点云数量超过百万级别时,其坐标转换的消耗就会十分明显,导致算法的使用体验变差。再者,基于可见性的方案中,往往需要进行点云到range image的数据格式变换,但range image又存在特别依赖分辨率和位姿精度,位姿估计不准了,点云分辨率低了,其识别动态点云的效果退化就严重了。
另一方面,基于栅格的动态障碍物滤除算法,栅格结合ray casting算法在理论不存在大的问题,但是在一些空旷区域激光光束没有return的信息,导致无法进行ray-casting来更新栅格里的概率值,但如果加大miss range的casting,其计算量又会大幅上升,导致最终的效果变差。
除此之外,基于可见性和基于栅格的动态障碍物滤除算法的过程中,遗留的问题在于:在建图时过程中,若操作人员(动态障碍物)跟着机器一直往前走的话,那基于ray casting或者visibility based模式去删除动态障碍物的话效果很差,因为相当于进入了上文中提到的“静态点不可见”的问题,同时基于可见性和基于栅格的局限性是由于算法设计时的物理前提所决定的,所以我认为根本解决不了。目前的思路是,基于学习的动态障碍物去除方法的局限性跟基于可见性和基于栅格的局限性不一样,结合基于deep-learning based聚类方法来处理基于可见性和基于栅格的动态障碍物滤除算法“误杀问题”和“静态点不可见”的问题,同时利用基于可见性或栅格的算法补充基于deep-learning based聚类方法的不足。
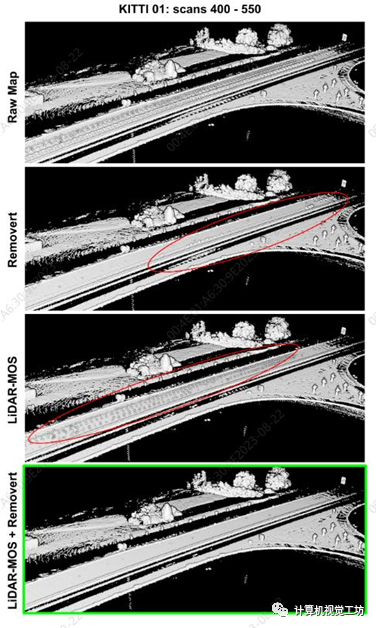
图:基于可见性和基于聚类的动态障碍物滤除算法的结合使用
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

